Работа при сниженном питании (Power Dip Ride-Through)
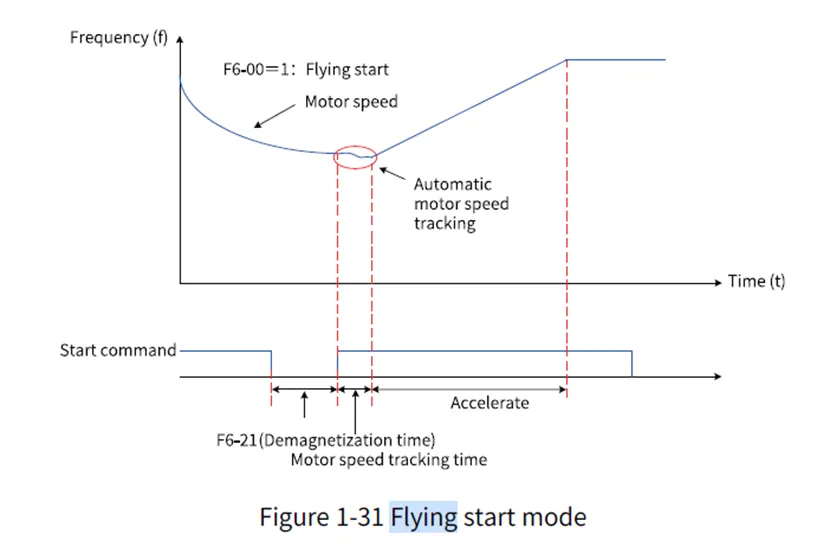
Функция обеспечивает непрерывную работу системы при мгновенном отключении питания. При мгновенном отключении питания преобразователь частоты поддерживает двигатель в режиме выработки электроэнергии (кинетический Back-Up), чтобы поддерживать напряжение на шине на уровне, близком к "пороговому значению напряжения для обеспечения отключения питания". Это предотвращает остановку привода переменного тока из-за пониженного напряжения. Смотрите следующий рисунок.
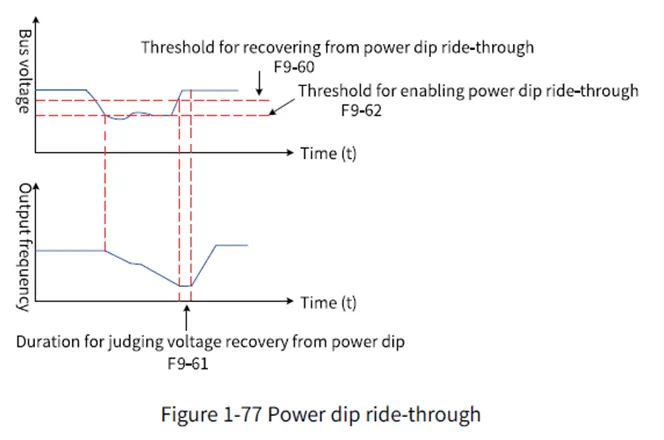
В этом режиме "поддержания напряжения на шине постоянным", когда возобновится подача питания, ПЧ восстанавливает заданную выходную частоту в зависимости от времени разгона. В режиме "замедление до остановки", когда сеть возобновляет подачу питания, преобразователь частоты продолжает замедляться до 0 Гц, останавливается и перезапускается только после получения команды запуска.
|
Параметр |
Функция |
По умолчанию |
Диапазон |
Описание |
|
F9-59 |
Функция работы при кратковременном отключении питания |
0 |
0: Отключено 1: Постоянный контроль напряжения на шине 2: Замедление до остановки 3: Подавление падения напряжения |
Эта функция ПЧ продолжать работу при мгновенном отключении питания. При мгновенном отключении питания ПЧ переводит двигатель в режим выработки электроэнергии, чтобы поддерживать напряжение на шине на уровне, близком к пороговому значению для обеспечения бесперебойного питания. Это предотвращает остановку ПЧ из-за пониженного напряжения. 0: Отключить функцию отключения питания отключена. 1: Постоянный контроль напряжения на шине. При сбое питания напряжение на шине сохраняется на уровне, близком к пороговому значению для обеспечения бесперебойного питания. В этом режиме, когда электросеть восстанавливается после сбоя, преобразователь частоты восстанавливает выходную частоту до заданной выходной частоты в зависимости от времени разгона. 2: Замедление для остановки. При сбое питания преобразователь частоты замедляется для остановки. В этом режиме, когда электросеть восстанавливается после сбоя, преобразователь частоты замедляется до 0 Гц, останавливается и включается только после получения команды на запуск. 3: Подавление падения напряжения Эта функция предотвращает остановку привода переменного тока, вызванную пониженным напряжением, при мгновенном отключении питания из-за падения напряжения. ● В режиме векторного управления время подавления устанавливается в соответствии с максимальной производительностью. ● В режиме V/f-управления асинхронным двигателем частоту можно регулировать внутри устройства для обеспечения нормальной работы в течение времени подавления скачка напряжения, заданного соответствующим параметром. Параметры F9-74, B6-56, BC-71 и CC-71 используются для установки времени подавления падения напряжения в группах двигателей 1, 2, 3 и 4 соответственно |
|
F9-60 |
Порог восстановления после кратковременного отключении питания |
85% |
80-100% |
Этот параметр определяет пороговое значение напряжения для отключения питания. Значение 100% соответствует 540 В. Это значение немного ниже напряжения на шине до отключения питания. При отключении питания напряжение на шине поддерживается на уровне около F9‑62 (порог определения отключения питания). При восстановлении подачи питания напряжение на шине повышается с F9‑62 (порог определения отключения питания) до F9‑60 (порог восстановления после отключения питания). В течение этого периода выходная частота привода переменного тока остается неизменной. уменьшается до тех пор, пока напряжение на шине не достигнет F9‑60 (порогового значения для восстановления после отключения питания). |
|
F9-61 |
Пороговое значение времени восстановления напряжения после кратковременного отключения питания |
0,5 сек |
0-100 сек |
Этот параметр используется для установки времени, необходимого для повышения напряжения на шине с F9 до 60 (порог восстановления после отключения питания) до напряжения, существовавшего до отключения питания. |
|
F9-62 |
Порог для включения режима кратковременного отключения питания |
80% |
80-100% |
Используется для задания уровня напряжения, при котором напряжение по шине поддерживается при сбое питания. При сбое питания напряжение по шине поддерживается в пределах F9-62 (порог для включения поддержания генераторного режима при провале мощности).
|
|
F9-71 |
Коэффициент усиления поддержания генераторного режима после кратковременного отключении питания |
40
|
от 0 до 100
|
Этот параметр действителен только при поддержании постоянного напряжения на шине (F9-59 = 1). Если во время отключения питания может возникнуть пониженное напряжение, увеличьте коэффициент усиления при отключении питания и интегральный коэффициент при отключении питания. |
|
F9-72 |
Коэффициент интегрирования поддержания генераторного режима после кратковременного отключении питания |
30 |
от 0 до 100
|
|
|
F9-73 |
Время замедления в режиме кратковременного отключения питания |
20 сек |
0-300 сек |
Этот параметр действителен только в том случае, если для параметра F9-59 (функция отключения питания) установлено значение 2 (замедление до остановки). Когда напряжение на шине ниже значения F9‑62, преобразователь частоты замедляется до остановки. Время замедления определяется этим параметром вместо F0‑18. |
Когда напряжение по шине падает ниже A5-06 или превышает A5-09, преобразователь частоты генерирует аварийный сигнал.
|
Параметр |
Функция |
По умолчанию |
Диапазон |
Описание |
|
A5-06 |
Порог пониженного напряжения
|
350.0 В
|
от 150.0 до 700.0 В
|
Когда напряжение на шине падает ниже A5-06, преобразователь частоты генерирует аварийный сигнал (от E05.00 до E07.00 или E09.00).
|